 |  |
тел.: +7 495 1087345 факс.: +7 495 1087345 office@trans-service.org |
 |  |  |
 |
 |



Навигация
Определение судна с помощью РЛС
Радиолокационные определения места судна представляют собой результат использования в различных комбинациях пеленгов и расстояний до опознанных ориентиров.
Способы определения места остаются те же, что и при визуальных наблюдениях, но РЛС в большинстве случаев расширяет возможности по измерению указанных навигационных параметров.
Измерение пеленга. Для определения направления на ориентиры используются электронные или механические визиры, которые совмещаются с отметками эхо-сигналов на экране РЛС. Если гирокомпас подключен к радиолокатору и изображение на экране стабилизировано по норду, то со шкалы снимается радиолокационный пеленг (РЛП). При стабилизации изображения по курсу со шкалы снимают радиолокационный курсовой угол (РЛКУ).
Расчеты ИП выполняются по соответствующим формулам:
ИП =РЛП+ΔГК; ИП = РЛКУ+КК+ΔК.
На точность радиолокационного пеленгования оказывают влияние ряд причин.
1. Ошибки визирования возникают при совмещении визирной линии с предполагаемой серединой отметки эхо-сигнала на экране РЛС. Основной причиной неточности совмещения является растягивание отметок эхо-сигналов по дуге пропорционально ширине диаграммы направленности (θ).
При различных отражающих способностях кромок объекта это растягивание бывает несимметричным. Ошибки визирования уменьшаются с удалением отметки от центра развертки. Так, средняя квадратичная ошибка визирования точечного объекта при удалении отметки на 1/3 радиуса экрана от центра развертки составляет ±0,6°, при удалении на 2/3 радиуса экрана — ±0,3°.
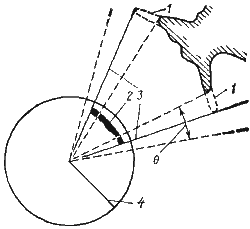
Особенно возрастают ошибки при пеленговании кромок протяженных объектов, облучаемых вдоль их водного уреза. В этом случае за счет ширины диаграммы направленности в горизонтальной плоскости эхо-сигнал на экране РЛС отмечается даже тогда, когда ее осевая линия не совмещена с кромкой объекта. Возникает угловая ошибка, учесть которую невозможно (рис. 102). По этой причине рекомендуется пеленговать только те мысы, которые вытянуты радиально по отношению к судну, т. е. облучаются «в упор».
|
|
|
Рис. 102. Ошибка радиолокационного пеленгования: 1 — участки удлинения мысов; 2 - эхо-сигнал; 3 — осевые линии диаграммы θ, соответствующие на экране РЛС пеленгам на мысы; 4 — отметка курса |
2. Ошибки эксцентриситета. Эти ошибки возникают в результате смещения центра развертки относительно центра вращения механического визира и могут достигать значительных величин. Например, при эксцентриситете в 1 мм ошибка в пеленге отметки, находящейся на удалении 1/2 радиуса экрана от центра развертки, составляет около ±0,7°.
Отсюда видно, насколько точно должна выполняться регулировка РЛС по совмещению центров вращения механического визира и развертки. В случае использования электронного визира ошибки эксцентриситета отсутствуют.
Точность радиолокационного пеленга, помимо перечисленных причин, зависит от ошибки в нуле отсчета (±0,3°), от инструментальной ошибки (±0,3'°), ошибки в поправке компаса.
Действие всех этих причин приводит к тому, что точность радиолокационного пеленга значительно ниже точности визуального. При использовании механического визира средняя квадратичная ошибка радиолокационного пеленга с учетом ошибки в ΔК составляет ±1,5°. Измерение расстояний. Почти во всех современных РЛС измерение расстояний выполняется с помощью дальномерного устройства, имеющего подвижное кольцо дальности (ПКД). В этом случае точность измерений зависит от инструментальной ошибки (±10 — 15 м), масштабной ошибки и ошибки совмещения ПКД с отметкой эхо-сигнала.
В радиолокационных станциях, где дальномерное устройство отсутствует, измерения расстояний производятся путем глазомерной интерполяции положения отметки эхо-сигнала между неподвижными кольцами дальности (НКД). Точность измерений этим способом ниже и зависит от ошибок положения колец дальности, нелинейности хода развертки и величины интервала между НКД.
Суммарная средняя квадратичная ошибка измерения расстояния помощью ПКД до точечного ориентира составляет ±0,6 — 1,0 %, до береговой линии — 0,6 — 3,0 % от измеренного расстояния.
При определении места судна необходимо выполнять следующие практические рекомендации, учитывающие особенности РЛС.
1. Регулировки усиления и яркости не должны вызывать чрезмерного свечения отметок на экране, а само изображение должно иметь хорошую фокусировку.
2. Пеленговать только точечные или малоразмерные объекты, выдающиеся в море мысы пеленговать только «в упор».
3. Пеленгование выполнять на шкалах самого крупного масштаба и таких объектов, отметки которых удалены от центра развертки на расстояние более 1/3 радиуса экрана.
4. Выбирать объекты для измерения расстояний с наиболее четкими краями отметок эхо-сигналов.
5. Измерять расстояния, используя тот способ совмещения ПКД с отметкой эхо-сигнала, который использовался при калибровке РЛС.
Определение места по измеренным расстояниям до опознанных ориентиров. Для применения этого способа необходимо иметь в видимости РЛС не менее двух точечных ориентиров или ориентиров малой протяженности. Последовательность измерения расстояний, приведение их к одному моменту и прокладка места на карте аналогичны изложенному в § 34. Для оценки точности определения места по двум или трем расстояниям используются формулы (104) и (95) соответственно.
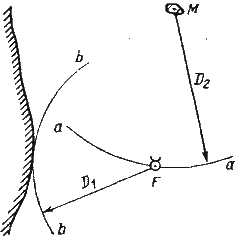
Определение места по измерению расстояний до точечного объекта и плавной береговой черты. Для определения места судна (рис. 103) измеряют в быстрой последовательности кратчайшее расстояние до береговой черты D1 и расстояние до точечного ориентира D2. Одновременно замечают время и отсчет лага. На карте из точечного ориентира М как из центра проводят дугу окружности аа радиусом, равным D2. Далее, находят на дуге аа такую точку F, из которой дуга окружности bb, описанная радиусом D1, будет касательной к береговой черте. Полученная точка F будет являться местом судна.
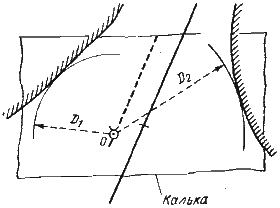
Определение места по кратчайшим расстояниям до береговой черты с плавными очертаниями. Способ применяется в том случае, когда на экране РЛС по различным направлениям видны ртметки опознанной береговой черты, не имеющей приметных ориентиров. С помощью ПКД (рис. 104) измеряют в быстрой последовательности кратчайшие расстояния до береговой черты D1 и D2, замечают время и показание лага. На листе кальки от произвольной точки О прокладывают линию курса судна и проводят дуги радиусами Dг и D2 в масштабе карты. На-
|
|
|
|
Рис. 103.
Определение места по двум |
Рис. 104. Определение места по |
|
|
|
|
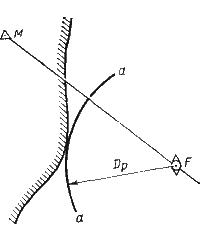
Рис. 105. Определение места |
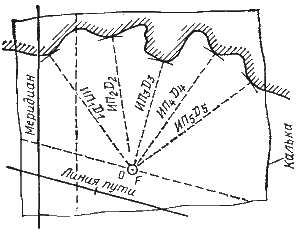
Рис. 106. Опознание места по вееру |
ложив кальку на карту в районе счислимого места, находят такое ее положение, при котором линии курсов на кальке и карте параллельны, а дуги радиусов D1 и D2 касаются соответствующих участков береговой черты. Накол циркулем в точке О даст положение места судна на карте.
Определение места по пеленгу и расстоянию. Если в пределах радиолокационной видимости находится опознанный точечный ориентир или ориентир малой протяженности, то для определения места судна измеряют радиолокационный пеленг и расстояние до него. Место судна на карте получается путем построений, изложенных в § 35.
Иногда бывает невозможно получить радиолокационный пеленг, так как ориентир не распознается на экране РЛС. В этом случае измеряют кратчайшее расстояние до плавной береговой черты D и берут визуально пеленг на ориентир М (рис. 105). На карте проводят линию ИП от ориентира М и с помощью циркуля находят на ней такую точку F, из которой дуга аа радиусом, равным Dp в масштабе карты, была бы касательной к береговой черте. Точка F является обсервованным местом судна.
Точность данного способа может быть оценена по формуле (105). Применяя этот способ определения, часто радиолокационный пеленг заменяют визуальным, что значительно повышает точность обсервации.
Опознание места судна по вееру пеленгов и расстояний. Способ может быть применен при плавании в районе с обрывистым берегом, имеющим характерные изгибы. Желательно, чтобы на карте был показан рельеф прилегающей суши и проведены горизонтали.
Для опознания места с помощью РЛС в быстрой последовательности берут серию пеленгов и расстояний до четких характерных отметок эхо-сигналов на экране. В основном это будут расстояния, измеренные до береговой черты, а иногда, в низменных участках, до характерных складок местности. При скорости судна менее 12 уз время и отсчет лага замечают в момент средних наблюдений.
Далее, на листе кальки проводят линии истинного меридиана и пути судна. Выбрав на линии пути произвольную точку F, прокладывают из нее измеренные истинные пеленги и откладывают по ним в масштабе карты измеренные расстояния (рис. 106). Кальку накладывают на карту в районе счислимого места и добиваются совпадения большинства конечных точек пеленгов с характерными изгибами береговой черты или деталями рельефа берега. При этом необходимо следить, чтобы линии меридианов и пути судна на кальке и карте оставались параллельными друг другу. Накол циркулем через кальку в точке F дает место судна на момент средних наблюдений.
Если скорость судна более 12 уз, то время и лаг замечают при каждом измерении пеленга и расстояния. В этом случае на кальке первые измерения откладывают от произвольной точки пути судна, а остальные — от точек, рассчитанных по счислению в масштабе карты. Далее поступают так же, как и в первом случае. Накол циркулем через кальку в последней точке на линии пути судна дает его опознанное место на момент последних наблюдений.
Чем больше будет выполнено наблюдений, тем точнее будет опознано место судна. Однако, чтобы исключить возможность случайного совпадения конечных точек пеленгов, необходимо опознание повторить несколько раз, сопоставляя его результаты с данными счисления.